
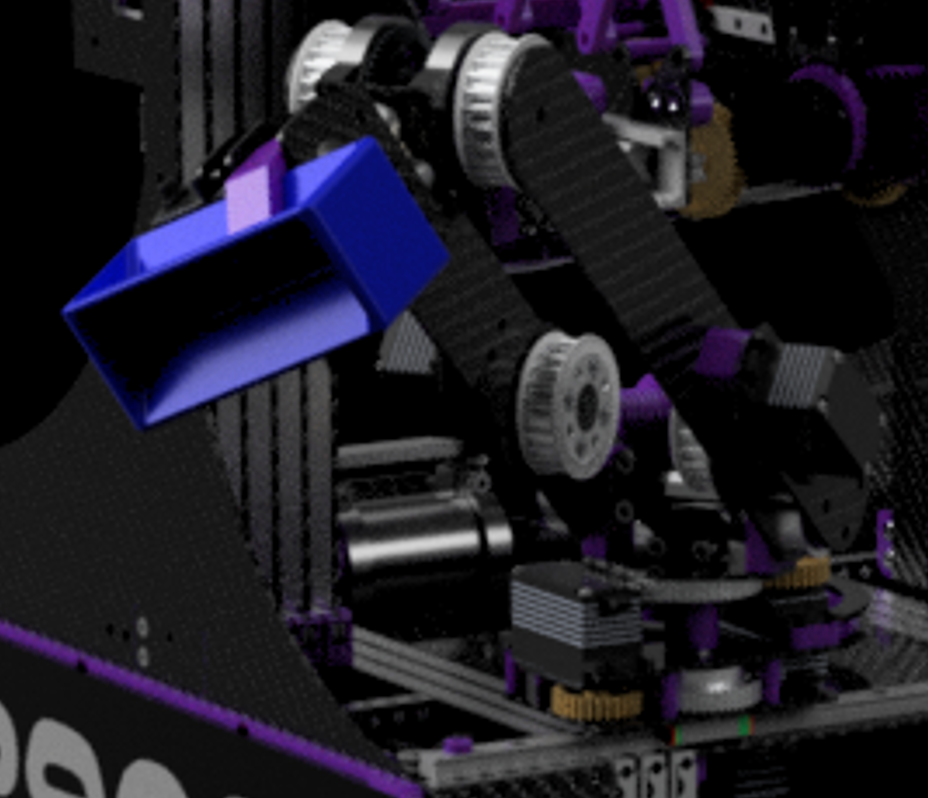
Intake
The intake of the Chiron robot exhibits several degrees of freedom. For one, there is a compact coaxial turret design, powered by 2 axon minis. This allows us to keep the intake efficient and speedy. Additionally, the wrist is powered by a differential mechanism, which allows the claw to have both a pivot and rotate degree of freedom, allowing us to inake samples at a wide range of orientations. Additionally, the intake is mounted on an MGN rail, allowing us to move the arm across the robot. This entire mechansim is mounted on an extendo, featuring 1.5 metres of extension.